BUCK CONVERTER
Konverter buck ( step-down converter ) adalah konverter daya DC-to-DC yang mengurangi tegangan (saat meningkatkan arus) dari input (pasokan) ke output (beban). Ini adalah kelas catu daya sakelar-mode (SMPS) yang biasanya mengandung setidaknya dua semikonduktor ( dioda dan transistor , meskipun konverter modern sering mengganti dioda dengan transistor kedua yang digunakan untuk perbaikan sinkron ) dan setidaknya satu elemen penyimpanan energi , kapasitor , induktor , atau keduanya dalam kombinasi. Untuk mengurangi riak tegangan, filter yang terbuat dari kapasitor (kadang-kadang dikombinasikan dengan induktor) biasanya ditambahkan ke output konverter (filter sisi beban) dan input (filter sisi pasokan). [1]

Gbr. 1: Diagram sirkuit konverter Buck.

Dua modul konverter uang komoditas kecil dan satu dorongan.
Operasi dasar buck converter memiliki arus dalam induktor yang dikendalikan oleh dua sakelar (biasanya transistor dan dioda ). Dalam konverter ideal, semua komponen dianggap sempurna. Secara khusus, sakelar dan dioda memiliki drop tegangan nol ketika dinyalakan dan arus nol arus saat mati, dan induktor memiliki resistansi seri nol. Selanjutnya, diasumsikan bahwa tegangan input dan output tidak berubah selama siklus (ini akan menyiratkan kapasitansi keluaran sebagai tak terbatas ).
Konverter Buck beroperasi dalam mode kontinu jika arus melalui induktor (
 ) tidak pernah jatuh ke nol selama siklus pergantian. Dalam mode ini, prinsip operasi dijelaskan oleh plot pada gambar 4:
) tidak pernah jatuh ke nol selama siklus pergantian. Dalam mode ini, prinsip operasi dijelaskan oleh plot pada gambar 4: - Ketika saklar yang digambarkan di atas ditutup (di atas gambar 2), tegangan melintasi induktor adalah
. Arus melalui induktor naik secara linier (dalam perkiraan, selama penurunan tegangan hampir konstan). Karena dioda dibiaskan terbalik oleh sumber tegangan V, tidak ada arus yang mengalir melaluinya;
- Ketika sakelar dibuka (di bawah gambar 2), dioda bias maju. Tegangan di induktor adalah
(mengabaikan drop dioda). Arus
 meningkat dan kemudian menurun selama off-state. L digunakan untuk mentransfer energi dari input ke output konverter.
meningkat dan kemudian menurun selama off-state. L digunakan untuk mentransfer energi dari input ke output konverter. Tingkat perubahan
dapat dihitung dari: 
 sama dengan
sama dengan  selama di-negara dan ke
selama di-negara dan ke  selama off-state. Oleh karena itu, peningkatan arus selama dalam keadaan diberikan oleh:
selama off-state. Oleh karena itu, peningkatan arus selama dalam keadaan diberikan oleh: 
 adalah skalar yang disebut siklus kerja dengan nilai antara 0 dan 1.
adalah skalar yang disebut siklus kerja dengan nilai antara 0 dan 1. Sebaliknya, penurunan arus selama off-state diberikan oleh:
 sama di
sama di  dan pada
dan pada  (gambar 4).
(gambar 4). Jadi kita bisa menulis dari persamaan di atas:

 sebanding dengan luas permukaan kuning, dan
sebanding dengan luas permukaan kuning, dan  ke area permukaan oranye, karena permukaan ini ditentukan oleh tegangan induktor (garis merah). Karena permukaan ini persegi panjang sederhana, area mereka dapat ditemukan dengan mudah:
ke area permukaan oranye, karena permukaan ini ditentukan oleh tegangan induktor (garis merah). Karena permukaan ini persegi panjang sederhana, area mereka dapat ditemukan dengan mudah:  untuk kotak kuning dan
untuk kotak kuning dan  untuk yang oranye. Untuk operasi steady state, area ini harus sama.
untuk yang oranye. Untuk operasi steady state, area ini harus sama. Seperti yang bisa dilihat pada gambar 4,
 dan
dan  .
. Ini menghasilkan:
 sama dengan rasio antara
sama dengan rasio antara  dan periode
dan periode  , tidak boleh lebih dari 1. Oleh karena itu,
, tidak boleh lebih dari 1. Oleh karena itu,  . Inilah sebabnya mengapa konverter ini disebut sebagai konverter step-down .
. Inilah sebabnya mengapa konverter ini disebut sebagai konverter step-down . Jadi, misalnya, melangkah 12 V ke 3 V (tegangan output sama dengan seperempat dari tegangan input) akan memerlukan siklus tugas 25%, dalam rangkaian ideal teoritis kami.
Mode terputus

Gbr. 5: Evolusi voltase dan arus dengan waktu dalam konverter buck ideal yang beroperasi dalam mode diskontinyu.
Arus induktor yang jatuh di bawah nol menghasilkan pemakaian kapasitor output selama setiap siklus dan oleh karena itu kerugian switching yang lebih tinggi. Teknik kontrol yang berbeda yang dikenal sebagai modulasi frekuensi-pulsa dapat digunakan untuk meminimalkan kerugian ini.
Kami masih mempertimbangkan bahwa konverter beroperasi dalam kondisi mapan. Oleh karena itu, energi dalam induktor adalah sama di awal dan di akhir siklus (dalam kasus mode terputus-putus, itu adalah nol). Ini berarti bahwa nilai rata-rata tegangan induktor (VL) adalah nol; yaitu, bahwa area persegi panjang kuning dan oranye pada gambar 5 adalah sama. Ini menghasilkan:


 ) adalah konstan, karena kami menganggap bahwa kapasitor output cukup
besar untuk mempertahankan tegangan konstan di terminal selama siklus
pergantian. Ini menyiratkan bahwa arus yang mengalir melalui kapasitor memiliki nilai rata-rata nol. Karena itu, kami memiliki:
) adalah konstan, karena kami menganggap bahwa kapasitor output cukup
besar untuk mempertahankan tegangan konstan di terminal selama siklus
pergantian. Ini menyiratkan bahwa arus yang mengalir melalui kapasitor memiliki nilai rata-rata nol. Karena itu, kami memiliki: 
 adalah nilai rata-rata arus induktor. Seperti dapat dilihat pada gambar 5, gelombang arus induktor memiliki bentuk segitiga. Oleh karena itu, nilai rata-rata I L dapat diurutkan secara geometris sebagai berikut:
adalah nilai rata-rata arus induktor. Seperti dapat dilihat pada gambar 5, gelombang arus induktor memiliki bentuk segitiga. Oleh karena itu, nilai rata-rata I L dapat diurutkan secara geometris sebagai berikut: 




Dari mode Discontinuous ke Continuous (dan sebaliknya)
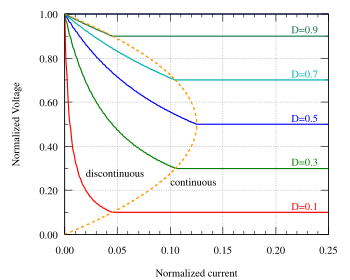
Gambar 6: Evolusi voltase keluaran dinormalisasi dengan arus keluaran dinormalisasi.





- tegangan dinormalisasi, ditentukan oleh
. Itu nol saat
, dan 1 kapan
;
- arus dinormalisasi, ditentukan oleh
. Syarat
sama dengan peningkatan maksimum arus induktor selama siklus; yaitu, peningkatan arus induktor dengan siklus tugas D = 1. Jadi, dalam operasi konverter, ini berarti
sama dengan 0 tanpa arus keluaran, dan 1 untuk arus maksimum yang dapat diberikan konverter.
- dalam mode kontinu:
-
- dalam mode terputus:
-




Pada level sirkuit, deteksi batas antara CCM dan DCM biasanya disediakan oleh induktor arus indra, yang membutuhkan akurasi tinggi dan detektor cepat sebagai: [3] [4]
sirkuit yang tidak ideal
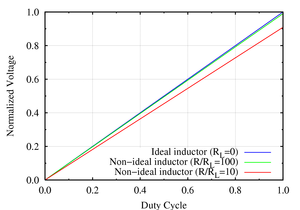
Gbr. 7: Evolusi tegangan output konverter buck dengan siklus tugas ketika resistensi parasit induktor meningkat.
- Kapasitor keluaran memiliki kapasitansi yang cukup untuk memasok daya ke beban (resistansi sederhana) tanpa variasi tegangan yang terlihat.
- Tegangan jatuh di dioda ketika maju bias adalah nol
- Tidak ada kerugian pergantian di saklar atau di dioda
Riak tegangan keluaran (mode kontinu)
Riak tegangan output adalah nama yang diberikan pada fenomena di mana tegangan output naik selama kondisi-On dan turun selama kondisi-Off. Beberapa faktor berkontribusi terhadap hal ini termasuk, tetapi tidak terbatas pada, frekuensi switching, kapasitansi keluaran, induktor, beban, dan fitur pembatasan arus dari sirkuit kontrol. Pada tingkat paling dasar tegangan output akan naik dan turun sebagai akibat dari pengisian dan pemakaian kapasitor output:
Selama keadaan Mati, arus dalam persamaan ini adalah arus beban. Dalam keadaan aktif, arus adalah perbedaan antara arus sakelar (atau sumber arus) dan arus beban. Durasi waktu (dT) ditentukan oleh siklus kerja dan oleh frekuensi switching.
Untuk negara:


Riak tegangan keluaran adalah salah satu kelemahan dari catu daya switching, dan juga dapat menjadi ukuran kualitasnya.
Efek ketidak-idealan pada efisiensi
Analisis sederhana dari konverter buck, seperti dijelaskan di atas, tidak memperhitungkan non-idealitas komponen sirkuit juga tidak memperhitungkan sirkuit kontrol yang diperlukan. Kerugian daya akibat sirkuit kontrol biasanya tidak signifikan jika dibandingkan dengan kerugian pada perangkat daya (sakelar, dioda, induktor, dll.) Ketidak-idealan dari perangkat daya bertanggung jawab atas sebagian besar kehilangan daya dalam konverter.Kerugian daya statis dan dinamis terjadi pada regulator switching. Kerugian daya statis termasuk
 (konduksi) kerugian di kabel atau jejak PCB, serta di sakelar dan induktor, seperti di sirkuit listrik apa pun.
Kehilangan daya dinamis terjadi sebagai akibat dari switching, seperti
pengisian dan pemakaian gerbang switch, dan sebanding dengan frekuensi
switching.
(konduksi) kerugian di kabel atau jejak PCB, serta di sakelar dan induktor, seperti di sirkuit listrik apa pun.
Kehilangan daya dinamis terjadi sebagai akibat dari switching, seperti
pengisian dan pemakaian gerbang switch, dan sebanding dengan frekuensi
switching. Berguna untuk memulai dengan menghitung siklus tugas untuk konverter buck yang tidak ideal, yaitu:

- V sw adalah penurunan tegangan pada sakelar daya,
- V sw, sinkronisasi adalah penurunan tegangan pada sakelar atau dioda sinkron, dan
- VL adalah drop tegangan pada induktor.

- R on adalah resistan ON pada setiap sakelar, dan
- R DC adalah resistansi DC dari induktor.
Untuk penurunan tegangan MOSFET, pendekatan yang umum adalah menggunakan R DSon dari lembar data MOSFET dalam Hukum Ohm, V = I DS R DSon (sat) . Perkiraan ini dapat diterima karena MOSFET berada dalam keadaan linier, dengan resistansi sumber drainase yang relatif konstan. Perkiraan ini hanya valid pada nilai V DS yang relatif rendah. Untuk perhitungan yang lebih akurat, lembar data MOSFET berisi grafik pada hubungan V DS dan I DS pada beberapa nilai V GS . Amati V DS di V GS dan I DS yang paling cocok dengan apa yang diharapkan di buck converter. [5]
Selain itu, kehilangan daya terjadi akibat arus bocor. Kehilangan daya ini sederhana

- Saya bocor adalah kebocoran arus sakelar, dan
- V adalah tegangan pada sakelar.
Switch turn-on dan turn-off loss mudah disatukan sebagai

- V adalah tegangan melintasi sakelar saat sakelar mati,
- t naik dan turun t adalah saklar naik dan turun kali, dan
- T adalah periode switching

Kehilangan daya pada dioda tubuh juga sebanding dengan frekuensi switching dan

- VF adalah tegangan maju dioda tubuh, dan
- t tidak adalah waktu non-tumpang tindih yang dipilih.

- Q G adalah biaya gerbang dari MOSFET yang dipilih, dan
- V GS adalah tegangan sumber gerbang puncak.
Desain lengkap untuk konverter buck termasuk analisis tradeoff dari berbagai kehilangan daya. Desainer menyeimbangkan kerugian ini sesuai dengan penggunaan yang diharapkan dari desain jadi. Konverter yang diharapkan memiliki frekuensi switching yang rendah tidak memerlukan sakelar dengan kerugian transisi gerbang yang rendah; konverter yang beroperasi pada siklus tugas tinggi membutuhkan sakelar sisi rendah dengan kerugian konduksi rendah.
Struktur khusus
rektifikasi sinkron

Gbr. 8: Skema sederhana konverter sinkron, di mana D digantikan oleh sakelar kedua, S 2 .
Dalam konverter buck standar, dioda flyback menyala dengan sendirinya, tidak lama setelah sakelar mati, sebagai akibat dari meningkatnya tegangan melintasi dioda. Penurunan tegangan ini di dioda menghasilkan kehilangan daya yang sama dengan

- V D adalah drop tegangan melintasi dioda pada arus beban I o ,
- D adalah siklus tugas, dan
- I o adalah arus beban.

Pertimbangkan catu daya komputer , dengan input 5 V, output 3,3 V, dan arus beban 10 A. Dalam hal ini, siklus tugas akan menjadi 66% dan dioda akan menyala selama 34% dari waktu. Dioda tipikal dengan tegangan maju 0,7 V akan mengalami kehilangan daya sebesar 2,38 W. MOSFET yang dipilih dengan baik dengan R DSon 0,015 Ω, akan tetapi, hanya membuang 0,51 W pada kehilangan konduksi. Ini berarti peningkatan efisiensi dan pengurangan pembangkitan panas.
Keuntungan lain dari konverter sinkron adalah konverter dua arah, yang cocok untuk aplikasi yang memerlukan pengereman regeneratif . Ketika daya ditransfer ke arah "terbalik", ia berfungsi seperti konverter penambah .
Keuntungan dari konverter buck sinkron tidak datang tanpa biaya. Pertama, saklar yang lebih rendah biasanya lebih mahal daripada dioda freewheeling. Kedua, kompleksitas konverter meningkat pesat karena kebutuhan akan driver switch pelengkap-output.
Pengemudi seperti itu harus mencegah kedua sakelar dinyalakan secara bersamaan, kesalahan yang dikenal sebagai "penembakan". Teknik paling sederhana untuk menghindari penembakan adalah penundaan waktu antara mematikan S 1 hingga menghidupkan S 2 , dan sebaliknya. Namun, pengaturan waktu tunda ini cukup lama untuk memastikan bahwa S 1 dan S 2 tidak pernah aktif akan mengakibatkan hilangnya daya berlebih. Teknik yang ditingkatkan untuk mencegah kondisi ini dikenal sebagai perlindungan "non-tumpang tindih" adaptif, di mana tegangan pada node switch (titik di mana S 1 , S 2 dan L bergabung) dirasakan untuk menentukan kondisinya. Ketika tegangan switch node melewati ambang preset, waktu tunda dimulai. Pengemudi dapat dengan demikian menyesuaikan ke banyak jenis sakelar tanpa kehilangan daya yang berlebihan yang akan diakibatkan fleksibilitas ini dengan waktu non-tumpang tindih yang tetap.
multi-fase

Gbr. 9: Skema konverter generik n- fase buck generik.

Gbr. 10: Gambar closeup catu daya CPU multifasa untuk prosesor AMD Socket 939. Tiga fase suplai ini dapat dikenali oleh tiga induktor toroidal hitam di latar depan. Induktor yang lebih kecil di bawah heat sink adalah bagian dari filter input.
Konverter jenis ini dapat merespons perubahan pemuatan secepat jika ia berganti n kali lebih cepat, tanpa peningkatan kehilangan pengalihan yang akan menyebabkannya. Dengan demikian, dapat merespon beban yang berubah dengan cepat, seperti mikroprosesor modern.
Ada juga penurunan signifikan dalam switching ripple. Tidak hanya ada penurunan karena peningkatan frekuensi efektif, [8] tetapi setiap kali n kali siklus kerja adalah bilangan bulat, riak pengalihan pergi ke 0; tingkat di mana arus induktor meningkat dalam fase yang dihidupkan sama persis dengan tingkat di mana ia berkurang dalam fase yang dimatikan.
Keuntungan lain adalah bahwa arus beban dibagi antara fase n dari konverter multifase. Pemisahan beban ini memungkinkan kehilangan panas pada masing-masing sakelar tersebar di area yang lebih besar.
Topologi sirkuit ini digunakan di motherboard komputer untuk mengubah catu daya 12 V DC ke tegangan yang lebih rendah (sekitar 1 V), cocok untuk CPU . Persyaratan daya CPU modern dapat melebihi 200 W, [9] dapat berubah sangat cepat, dan memiliki persyaratan riak yang sangat ketat, kurang dari 10 mV. Catu daya motherboard biasa menggunakan 3 atau 4 fase.
Salah satu tantangan utama yang melekat pada konverter multifase adalah memastikan arus beban seimbang secara merata di seluruh n fase. Penyeimbangan saat ini dapat dilakukan dengan beberapa cara. Arus dapat diukur "tanpa kehilangan" dengan merasakan tegangan melintasi induktor atau sakelar bawah (saat dihidupkan). Teknik ini dianggap lossless karena mengandalkan kerugian resistif yang melekat dalam topologi buck converter. Teknik lain adalah dengan memasukkan resistor kecil di sirkuit dan mengukur tegangan di atasnya. Pendekatan ini lebih akurat dan dapat disesuaikan, tetapi menimbulkan beberapa biaya — ruang, efisiensi, dan uang.
Akhirnya, arus dapat diukur pada input. Tegangan dapat diukur secara lossless, melintasi saklar atas, atau menggunakan resistor daya, untuk memperkirakan arus yang ditarik. Pendekatan ini secara teknis lebih menantang, karena beralih kebisingan tidak dapat dengan mudah disaring. Namun, ini lebih murah daripada menggunakan resistor akal untuk setiap fase.
Faktor efisiensi
Kehilangan konduksi yang tergantung pada beban:
- Perlawanan ketika transistor atau saklar MOSFET sedang melakukan.
- Penurunan tegangan maju dioda (biasanya 0,7 V atau 0,4 V untuk dioda schottky )
- Resistor berliku induktor
- Resistansi seri ekuivalen kapasitor
- Kehilangan tumpang tindih Tegangan-Ampere
- Switch frekuensi * Kerugian 2 CV
- Membalikkan kehilangan latensi
- Kerugian karena mengemudi gerbang MOSFET dan konsumsi pengontrol.
- Transistor kebocoran kehilangan arus, dan konsumsi pengontrol siaga. [10]
Impedansi yang cocok
Konverter buck dapat digunakan untuk memaksimalkan transfer daya melalui penggunaan pencocokan impedansi . Aplikasi ini ada dalam pelacak titik daya maksimum yang biasa digunakan dalam sistem fotovoltaik .
Dengan persamaan untuk daya listrik :
Dengan persamaan untuk daya listrik :

- V o adalah tegangan output
- I o adalah arus keluaran
- η adalah efisiensi daya (mulai dari 0 hingga 1)
- V i adalah tegangan input
- I i adalah input saat ini

- Z o adalah impedansi keluaran
- Z i adalah impedansi input

- D adalah siklus tugas



Comments
Post a Comment